
컨트롤릭 foot IK 트레이스 스탭
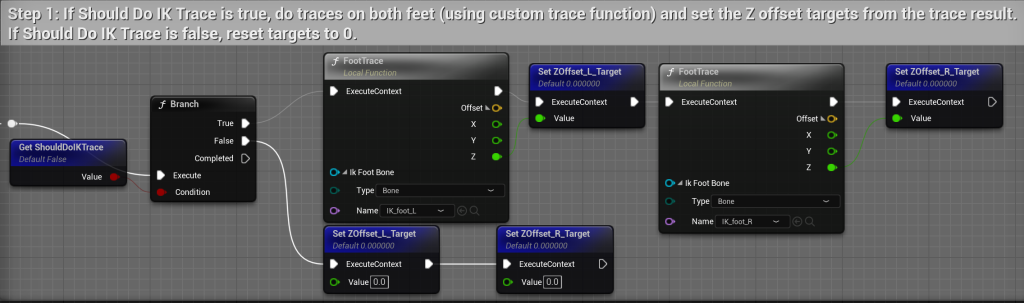
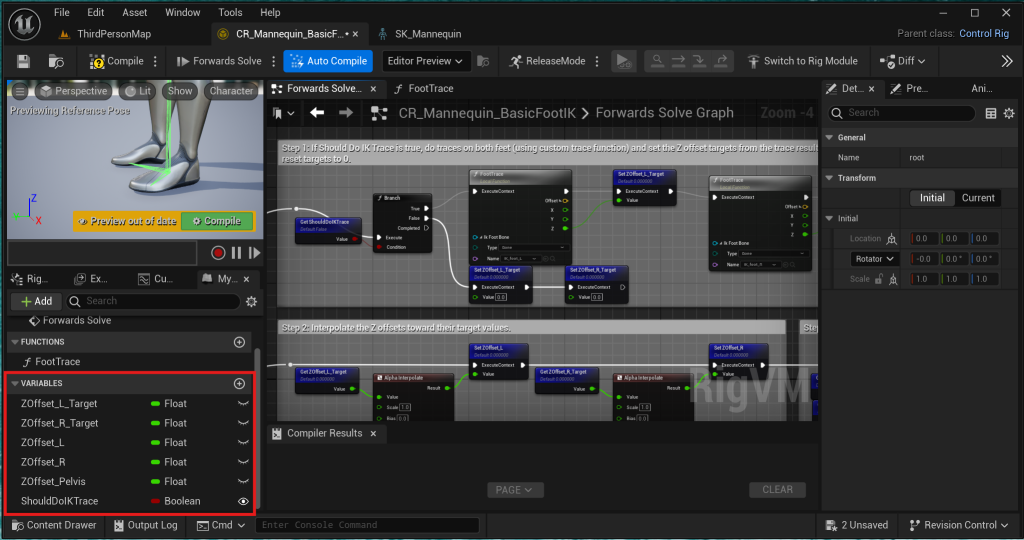
마네킹의 컨트롤릭 CR_mannequin_GasicFootIK의 Step1은 위와 같다. 사용되는 변수는 아래와 같다.
앞의 포스팅 내역을 바탕으로 스텝1의 로직을 정리하면 아래와 같다.
- 캐릭터가 점프나 낙하 상태가 아닐경우 IK_foot_L 본을 인풋 인자로 FootTrace 함수를 호출한다.
- IK_foot_L은 foot_l과 비슷한 위치에 있으며 해당 발의 위치보다 30 높은 위치에서 50낮은 위치까지 스피어 트레이싱을 한다.
- 이때 찾은 바닥의 위치를 FootTrace 함수에서 리턴해준다.
- 찾은 바닥의 위치정보 중 높이정보 z만 공용 변수 ZOffset_L_Target에 저장한다.
- 오른쪽 발 역시 같은 작업을 통해 ZOffset_R_Target변수를 세팅한다
- 만약 캐릭터가 점프중이거나 낙하중일때 (ShouldDoIKTrace가 false)일때 이 두 공용변수 ZOffset_L_Target를 0으로 리셋한다.