
인터폴레이션(Interpolation)
마네킹의 컨트롤릭 CR_mannequin_GasicFootIK의 Step2 로직을 아래와 같이 바꿔보자
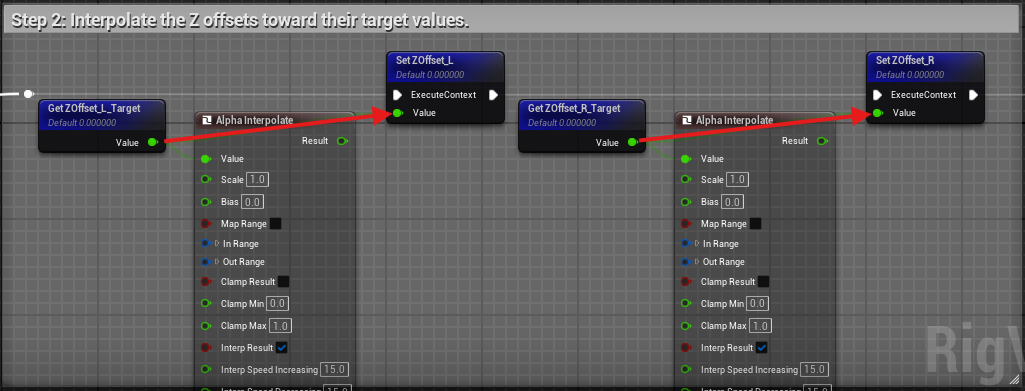
- Get ZOffset_L_Target 노드의 value를 -> Set ZOffset_L 노드의 value로
- Get ZOffset_R_Target 노드의 value를 -> Set ZOffset_R 노드의 value로
이후 플레이 해보면 마네킹 발의 바닥위치로 순식간에 이동한다
이를 스냅현상(snapping)이라 한다.
이를 바로 이동 시키지말고 부드럽게 움직이도록 해주는 처리를 인터폴레이션(보간, Interpolation)이라고 한다.
바꾼 설정은 원복하자
알파 인터폴레이트 노드
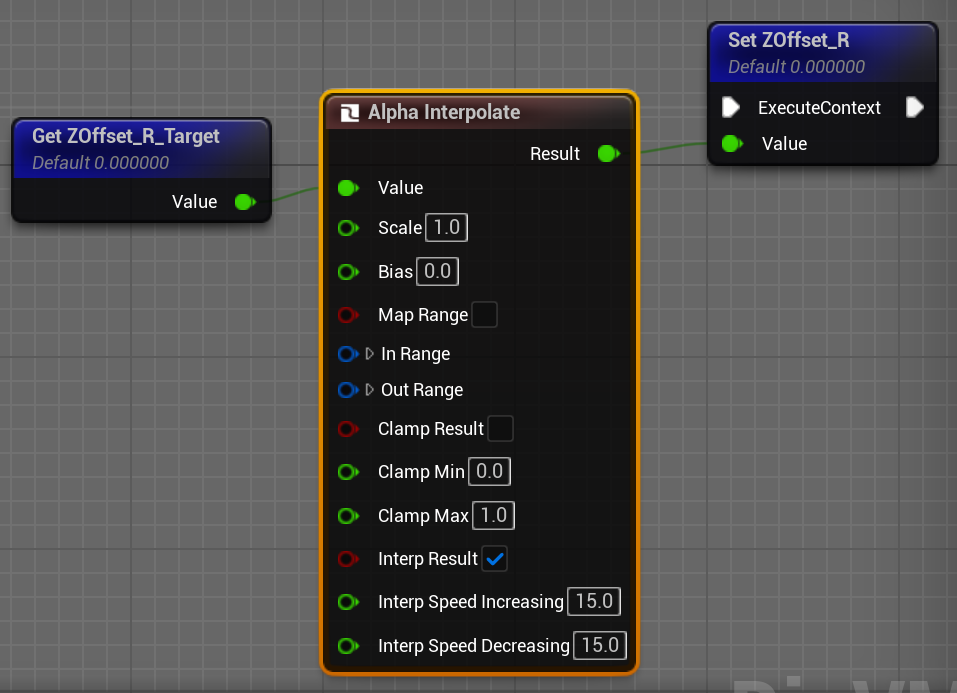
- 노드의 Interp Speed Increasing 핀: 값이 올라가야 할때의 상승 속도
- 노드의 Interp Speed Decreasing 핀: 값이 내려가야 할때의 하강 속도
알파 인터폴레이트 노드는 시작할때 0의 초기값을 가지며 매순간 value로 들어온 값을 향해 상승하거나 하강한다. 이때 상승 속도와 하강속도는 노드 하단 두 핀으로 정해진다.
CR_mannequin_GasicFootIK의 Step2에서는, Step1에서 스피어 트레이스를 통해 찾은 발의 타겟 높이(ZOffset_R_Target, ZOffset_L_Target)를 향해 발의 현재 높이(ZOffset_R, ZOffset_L)가 항상 따라다니는 상황을 만든다.